機械システム学系
フィールドロボティクス研究室
大金 一二准教授
機械システム学系
大金 一二准教授
フィールドロボットとは屋外で活動するロボットの 総称です実用化を目的としたフィールドロボットの開発を行っています。



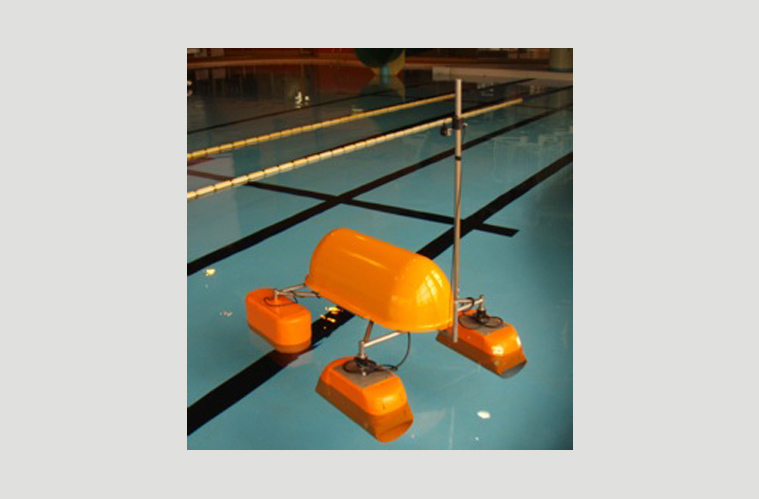
目的: 海上(水上)の作業の支援 人命救助 安全、環境監視 漁業資源の監視(養殖場,密漁など) 海洋調査など 特徴: メールによる指令の送信など 海上(水上)での作業の省力化 主な研究内容:風量の利用 安全で効率の良い推進装置の開発
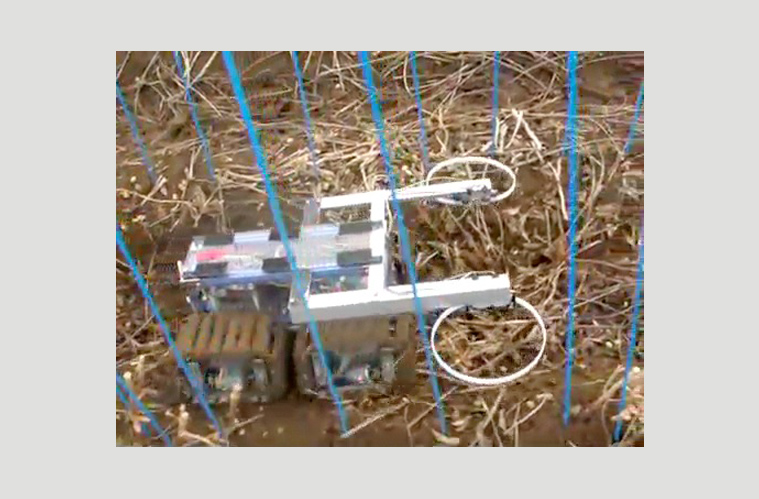
目的: 圃場(畑)での農作業支援 農薬の局所的散布 農作物の管理(育成状況、固体管理) 農地の巡回、監視 特徴: うね間の自律走行など 安心、安全な作物生産の労力を低減 主な研究内容:ロボットの機構 株認識センサの開発
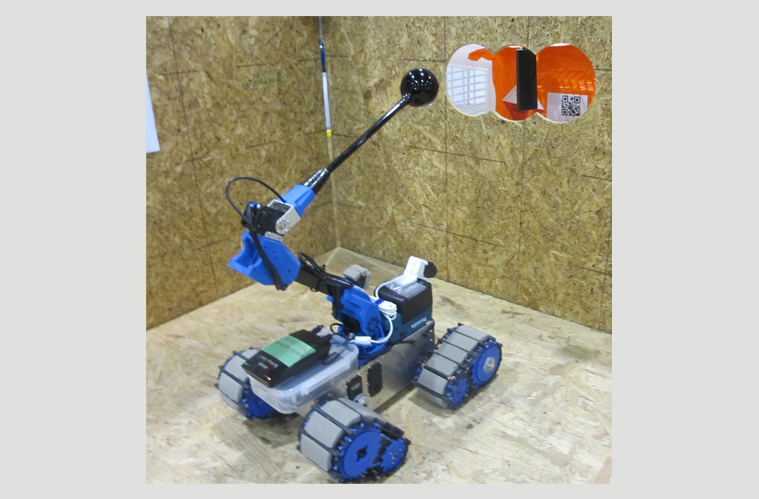
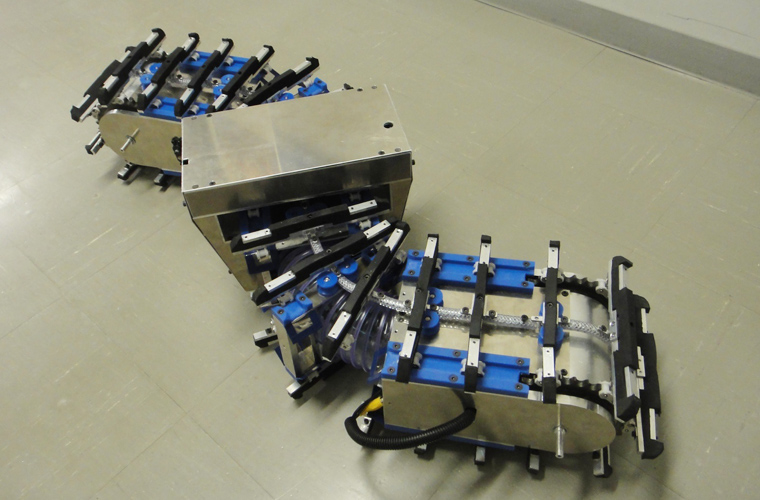
目的: 要救助者の探索 狭小空間への侵入 不整地での高い移動能力など 特徴: 軽量・小型ロボット 可搬性、脆弱路面での高機動性 簡単な操作 タブレットPCによる操作 受動可動クローラによる障害物乗越えの自律化 半自律動作 要救助者の探索、ガレキ内の調査 主な研究内容: クローラ機構の開発 半自律動作のための操作システムの開発 新しい移動機構の開発

フィールド・ロボットの研究・開発を行っています。フィールド・ロボットとは屋外で活用するロボットで、研究室では、災害対応ロボットをはじめとして、除雪や除草に関するロボットの開発を行っています。また、これらのロボットの評価手法について研究しています。
TEL: 0257-22-8111
E-mail:koogane@niit.ac.jp
E-mailアドレスの「@」を半角に置き換えてください。