機械システム学系
知能ロボット工学研究室
池田 英俊准教授

機械システム学系
池田 英俊准教授
人間の生活空間内において作業を行い、人々を支援する「人間共存型ロボット」に関する研究を行っています。
特に、ロボットの「移動能力」と「作業能力」の向上を目指しており、これらの実現に向けて様々な「ものづくり」を行っています。
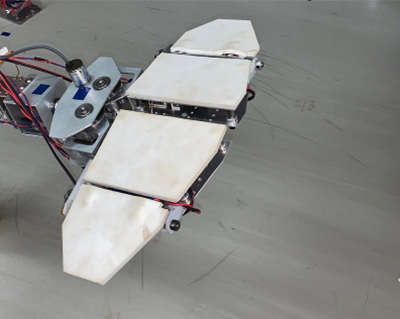
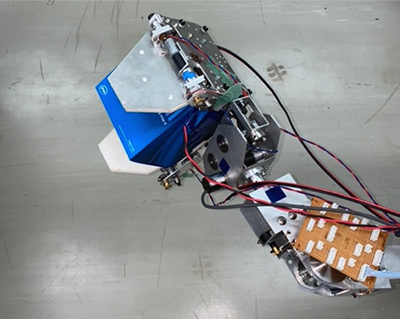
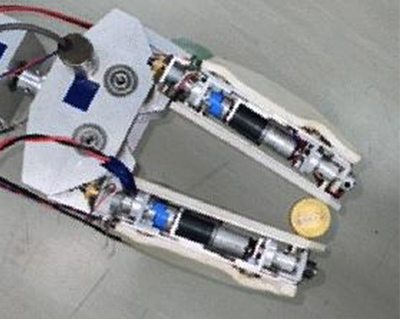
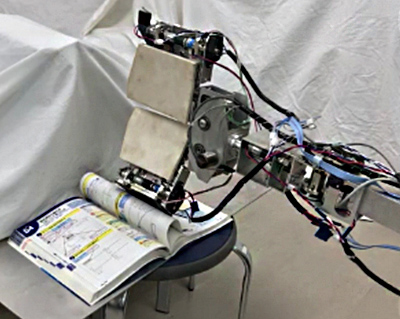
「物体をのせる」、「つかむ」、「かきだす」、「つまむ」等の作業遂行時の手の形を、折りたたみ可能な平面機構を用いて模倣することで、少ない自由度で構成できるロボットハンドを提案し、研究を行っています。
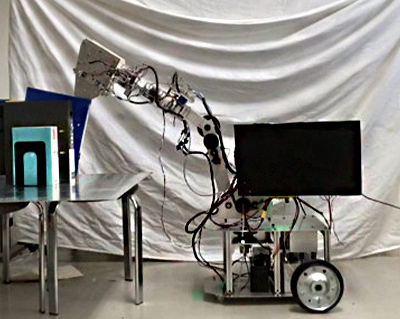
車輪型移動機構の弱点である不整地(階段、段差、舗装されていない路面等)における移動能力の目指し、理論、実験両面からアプローチしています。
これまで、ロボットハンド、車いすユーザーを支援する介護ロボット等の研究開発を行ってきました。人間共存型ロボットや介護機器設計開発などに関してお困りの際はご相談ください。
TEL: 0257-22-8140
E-mail:ikedah@niit.ac.jp
E-mailアドレスの「@」を半角に置き換えてください。