Research Topics
研究トピックス
海洋インフラ点検用水中ロボットの開発 〜柔軟インペラを用いた水中ロボット用円筒型推進器(CTFI)の開発~

大金 一二 准教授OOGANE Katsuji

本研究では海中の構造物等のインフラ点検を行う水中ロボットとロボットの推進器(スラスター)の開発を行っています。
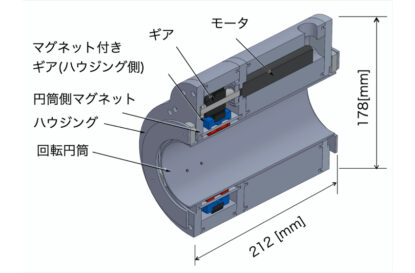
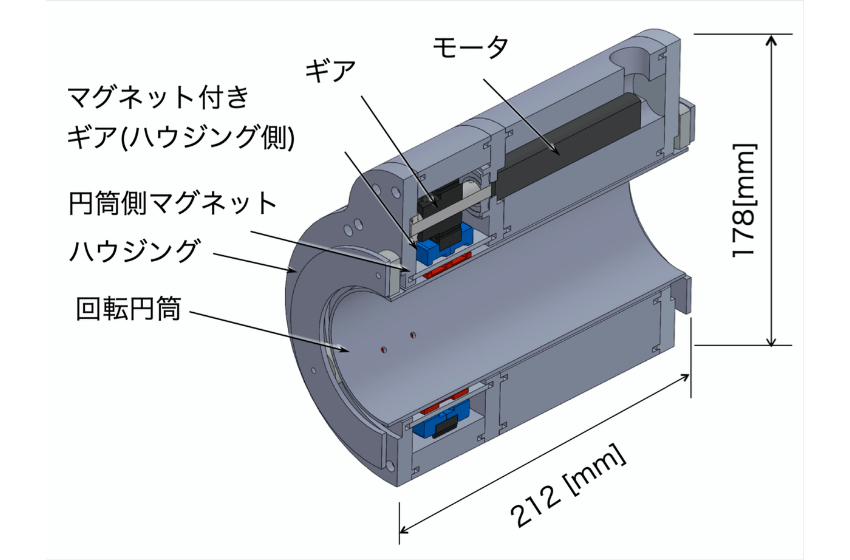
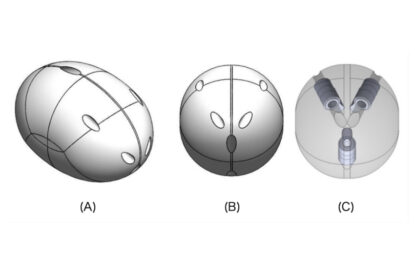
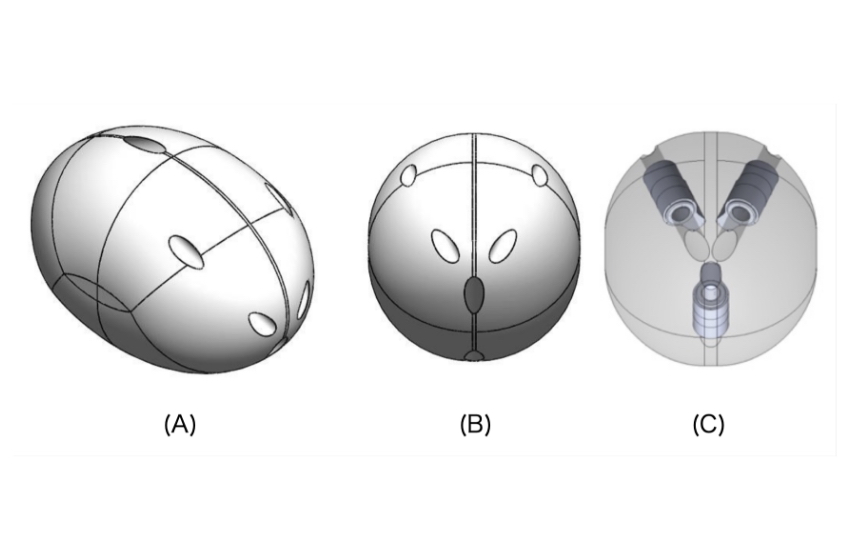
現在、高度成長期に整備された橋梁等の社会インフラの老朽化が問題となっており、それらの点検作業を行うロボットに関する研究が盛んに行われています。このようなロボットによるインフラ点検は地上に限らず、海中でもそのニーズが高まっています。本研究では構造物周りの流れの影響を受けにくい楕円形のかたちをしたロボットを考えており、そのロボットに使用する推進器として柔軟インペラを用いた円筒型推進器(CTFI: Cylindrical Thruster with Flexible Impeller)を開発しています。
CTFIは柔らかなインペラが取り付けられた円筒を回転させることで推力を発生させています。回転部分を内側に設けるため、回転部分が構造物に接することがなく、構造物を傷つける心配がありません。また、柔らかいインペラを用いているため、推進器内に異物が入ってもインペラが破損される可能性が減り、ゴミ等が漂う水中でも使用することができると考えています。
長岡技術科学大学卒業/長岡技術科学大学大学院修士・博士課程修了/専門はフィールドロボット、流体工学/IEEE International Symposium on Safety, Security, and Rescue Robotics Best Late Breaking Report Award(2017年)
大金 一二 准教授の主な研究内容や、連絡先は大学リソースデータベースをご確認ください。
大学リソースデータベース


